作者:許家碩
指導老師:沈揚庭
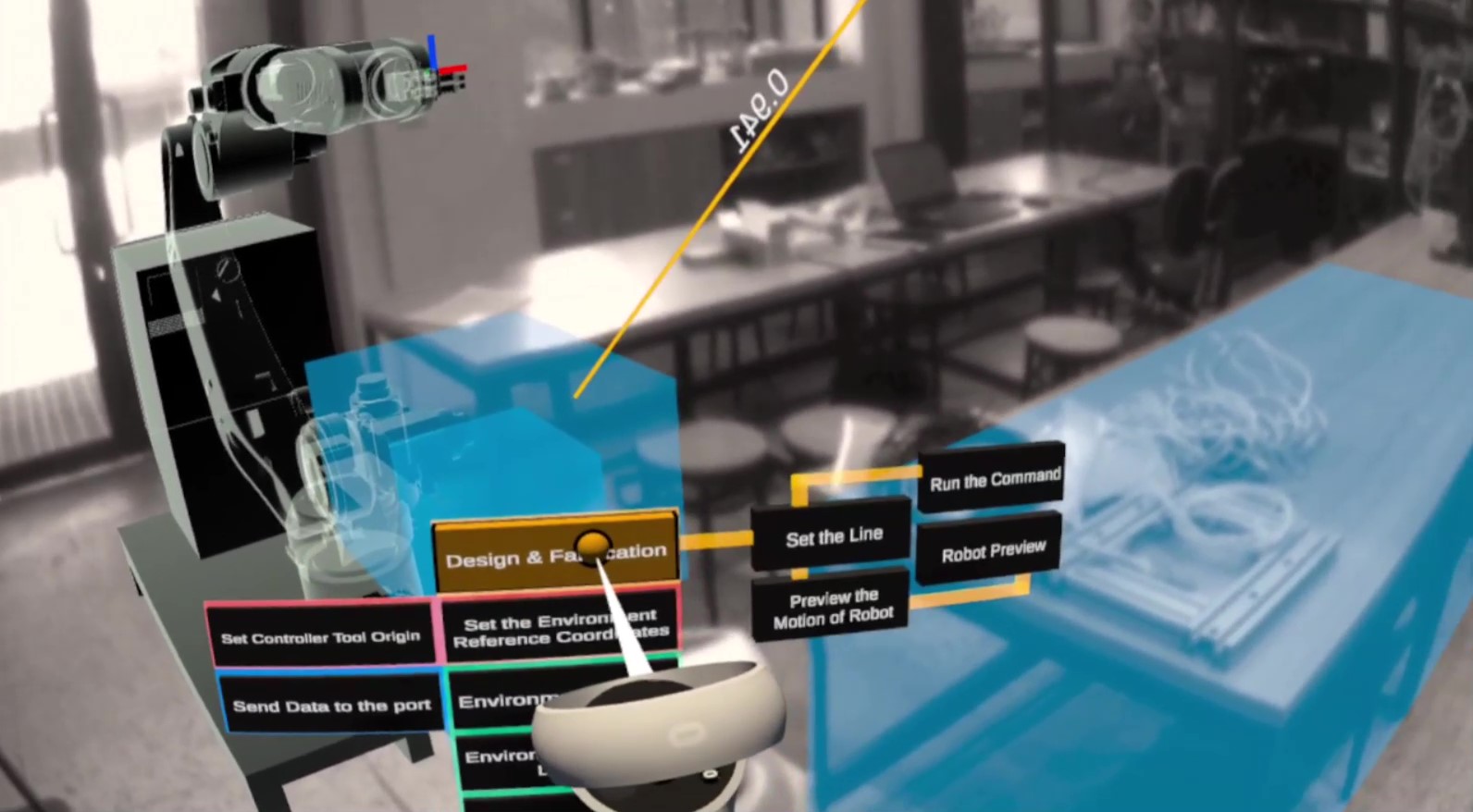
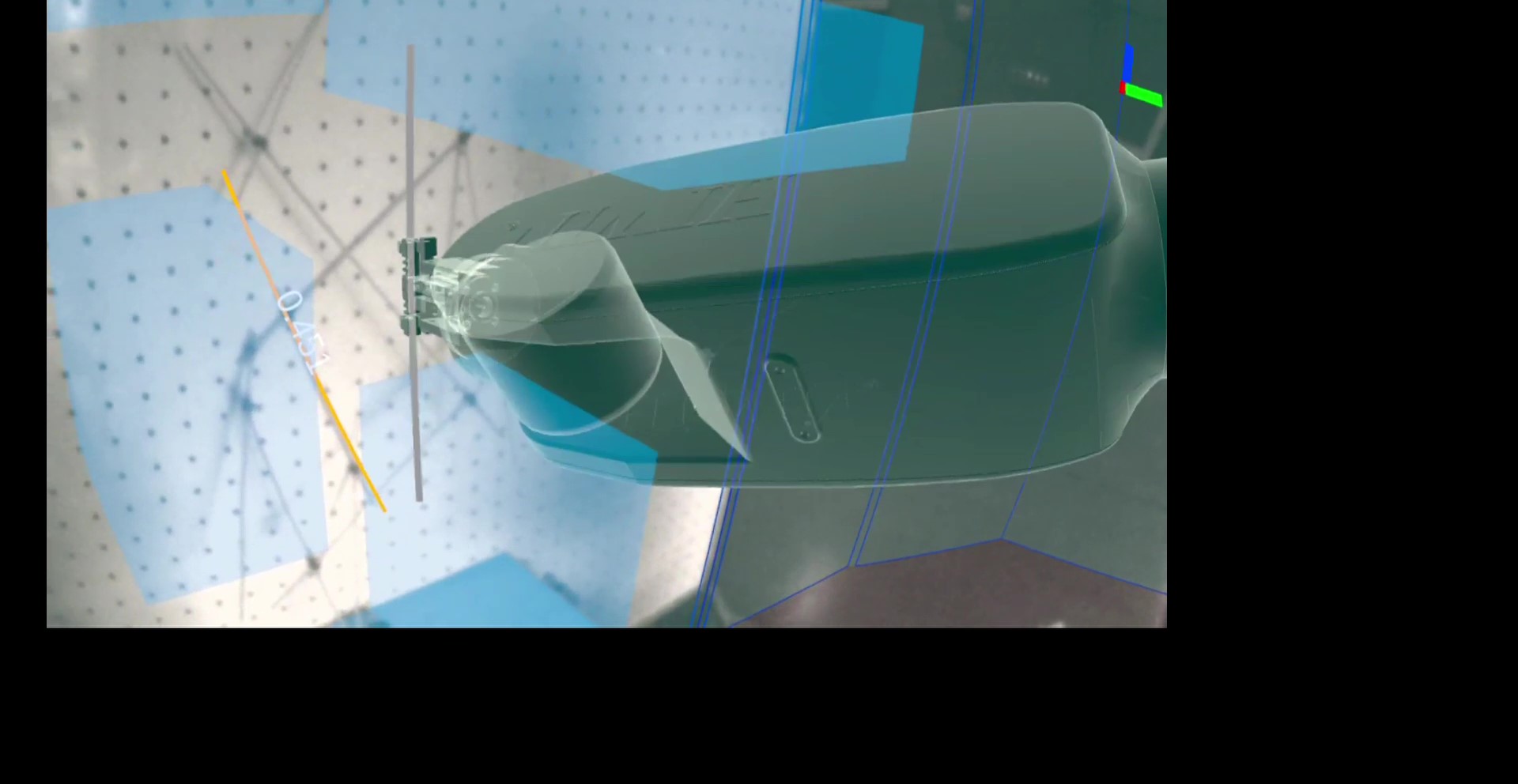
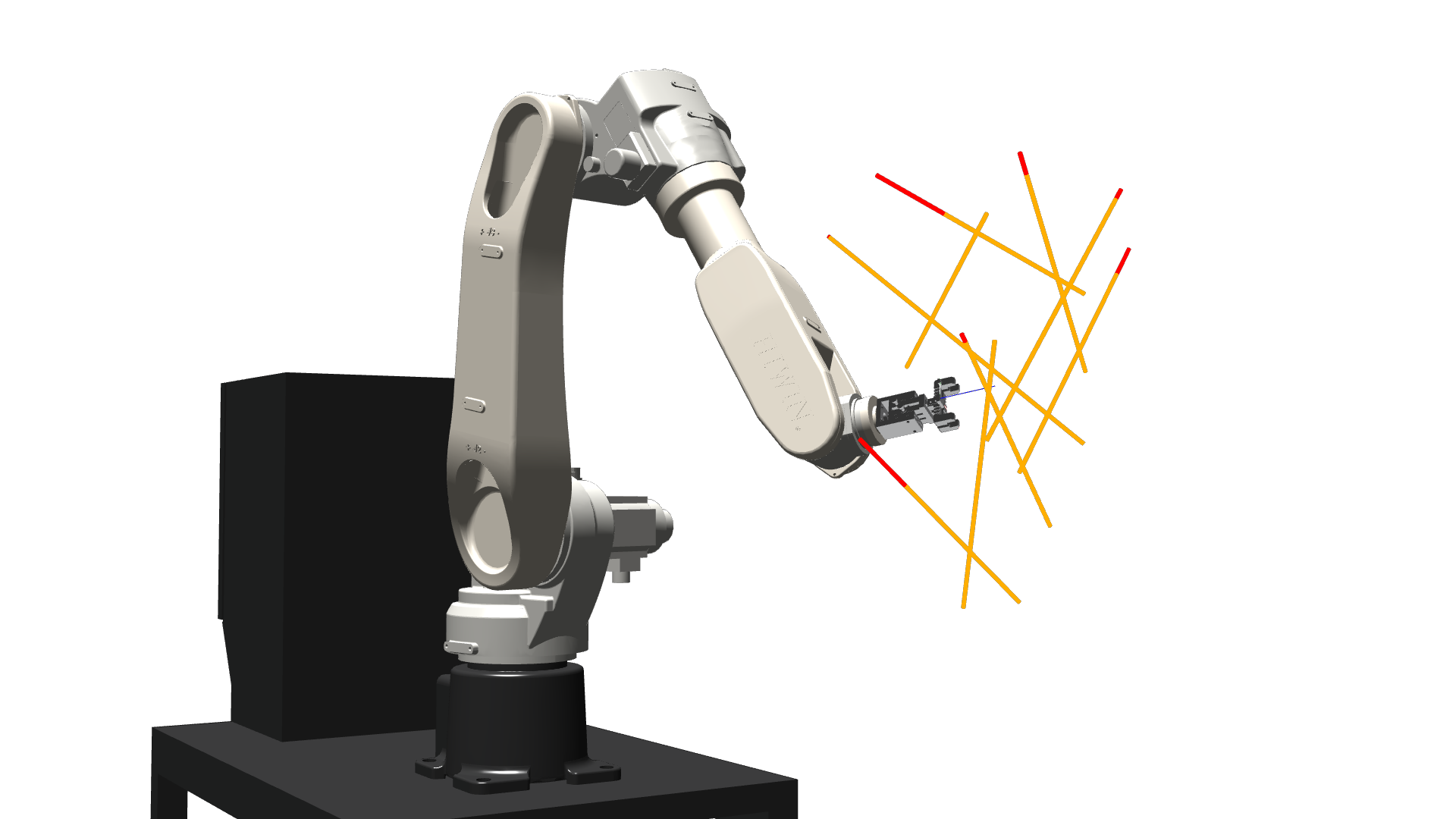
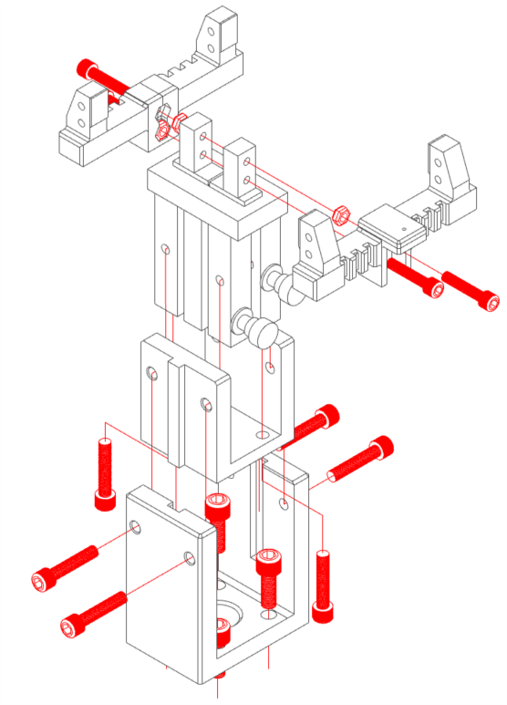
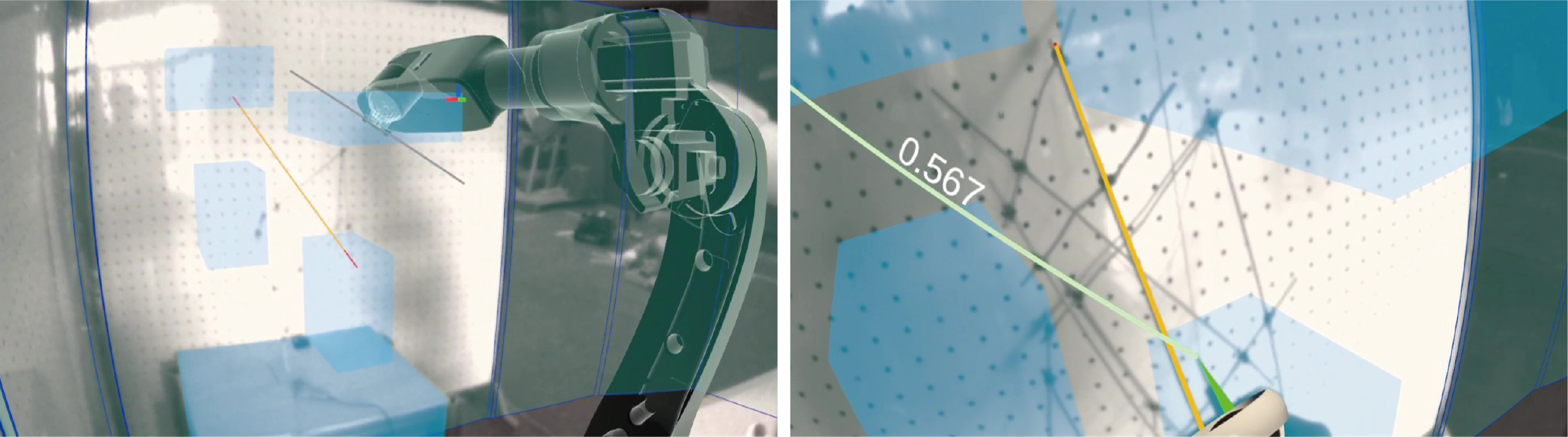
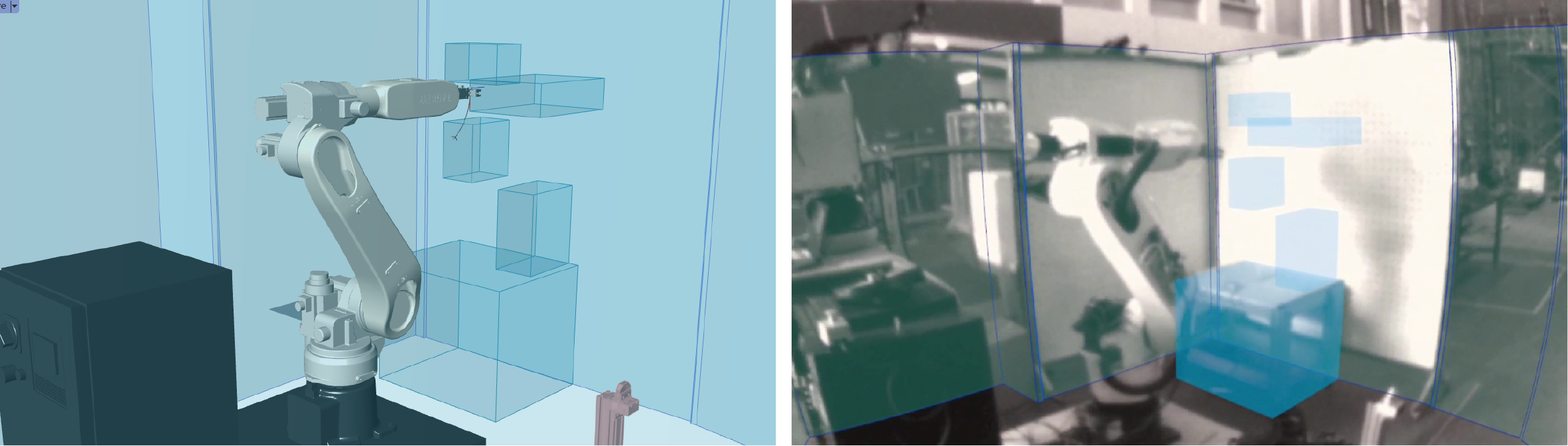
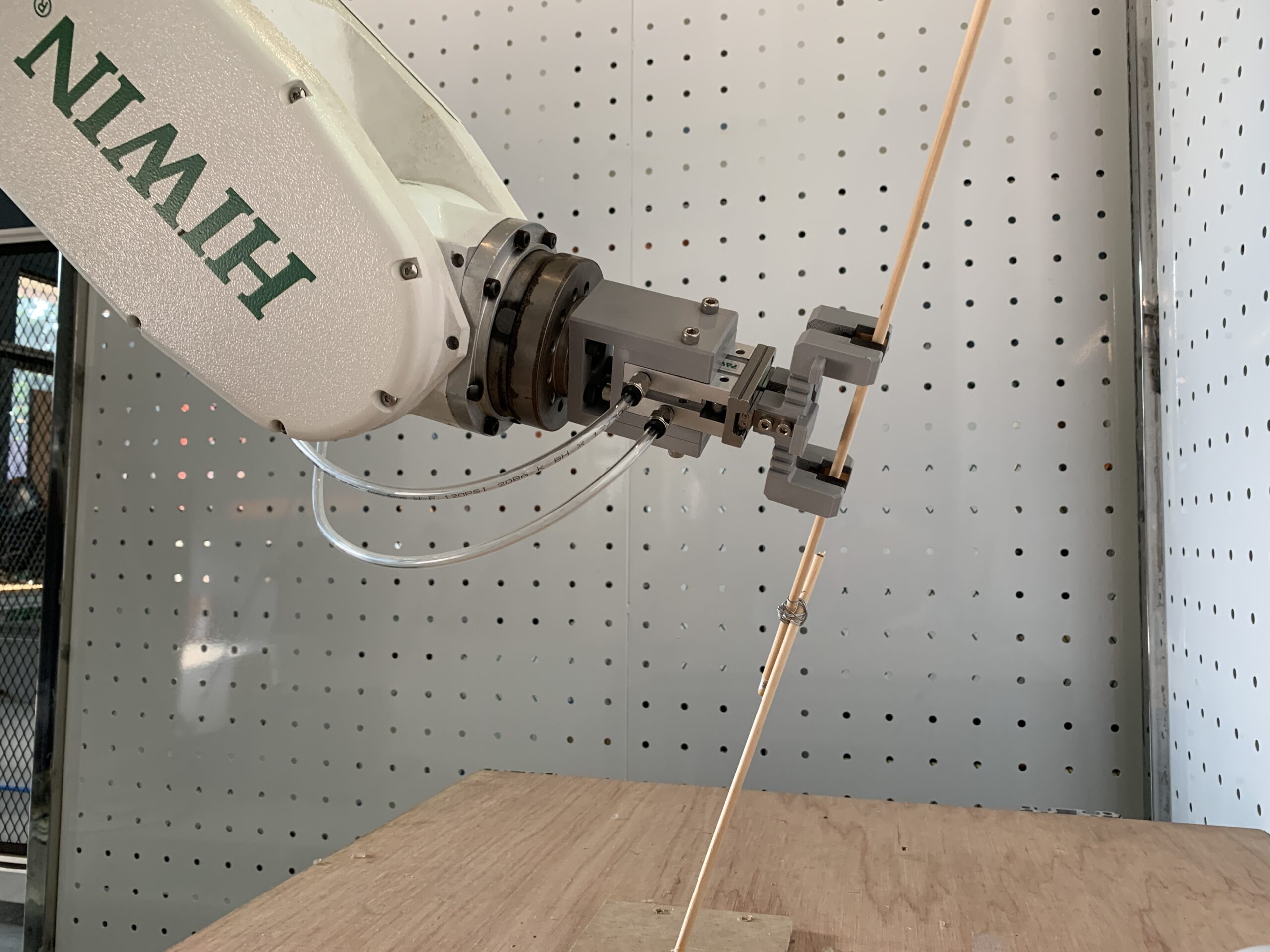
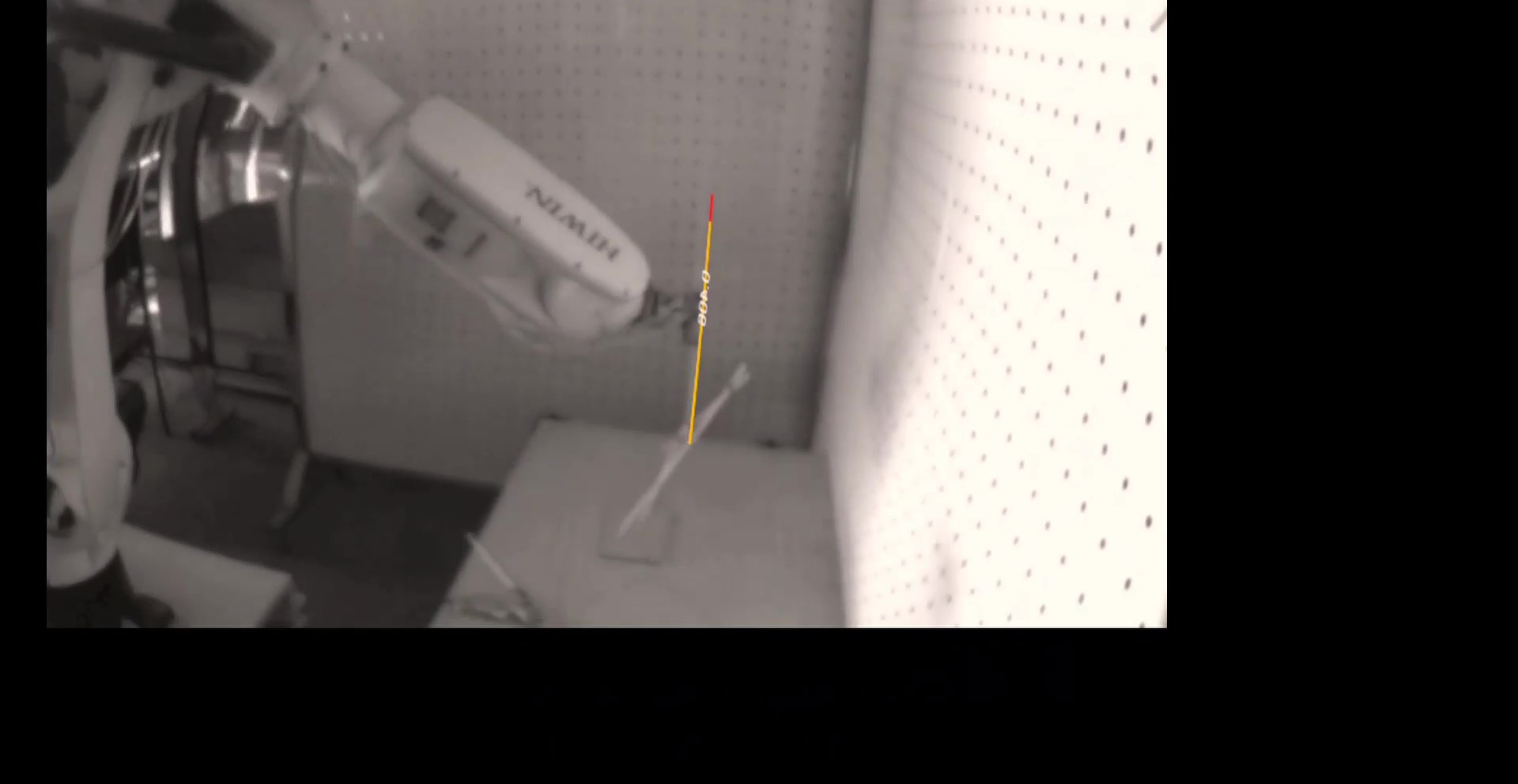
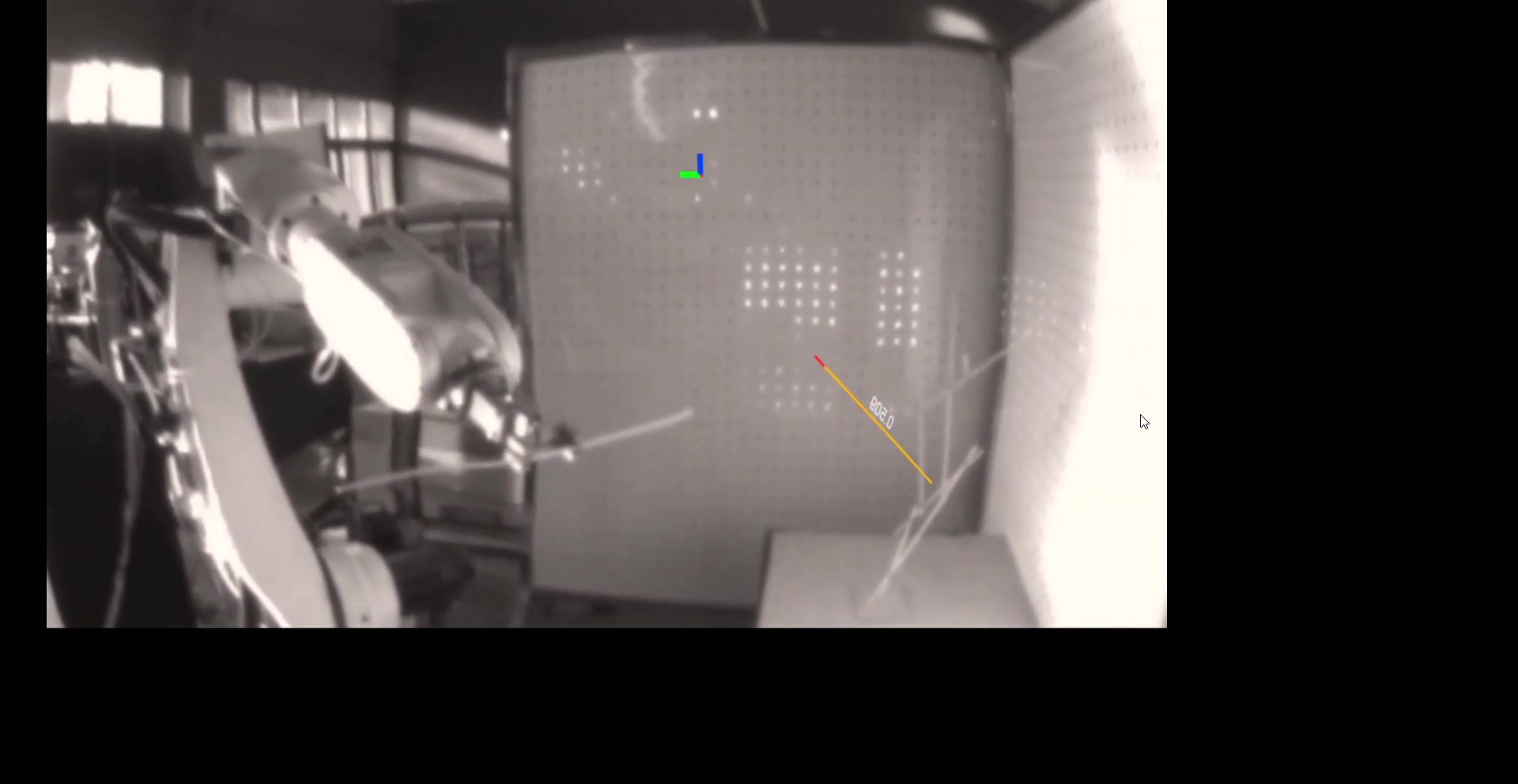
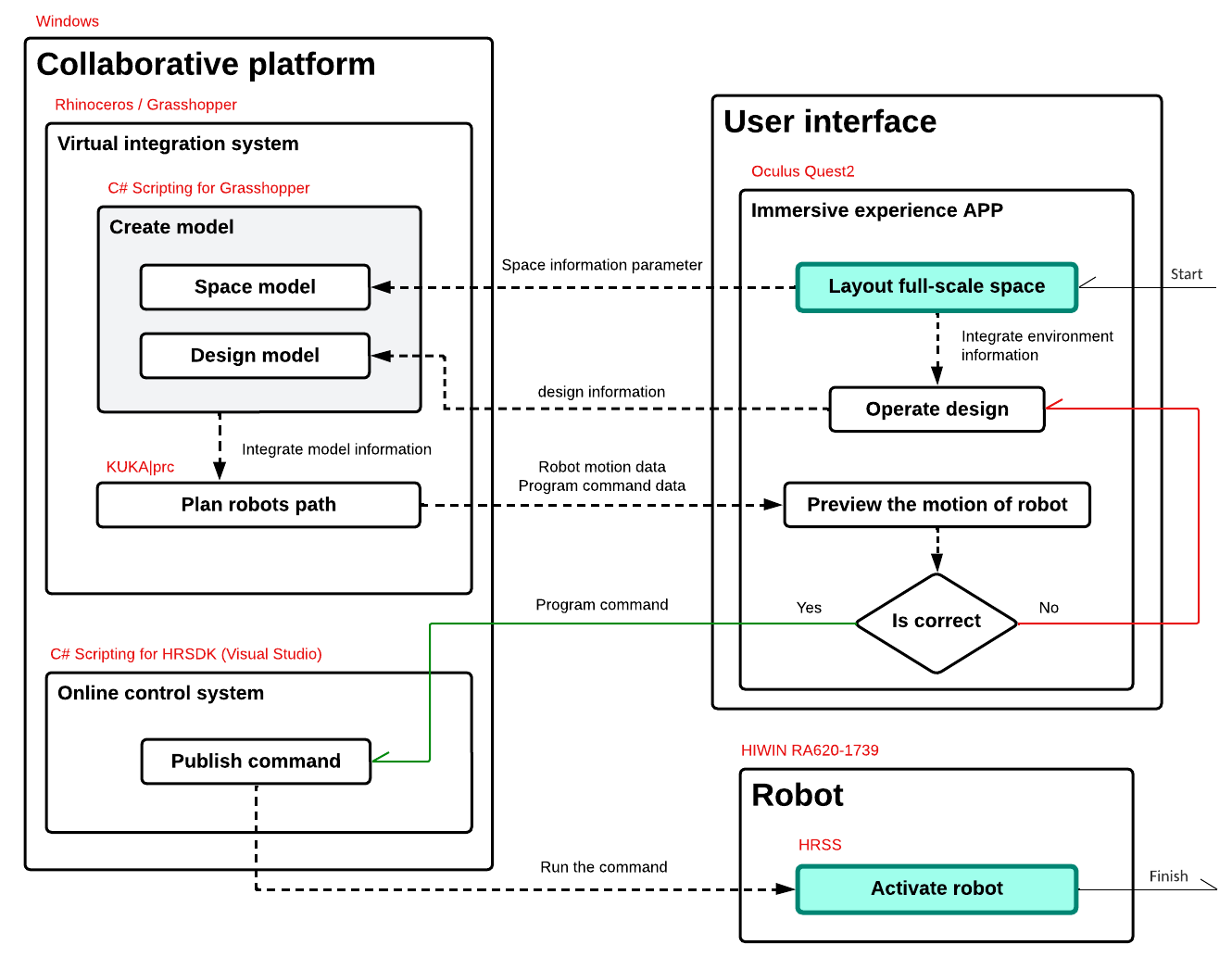
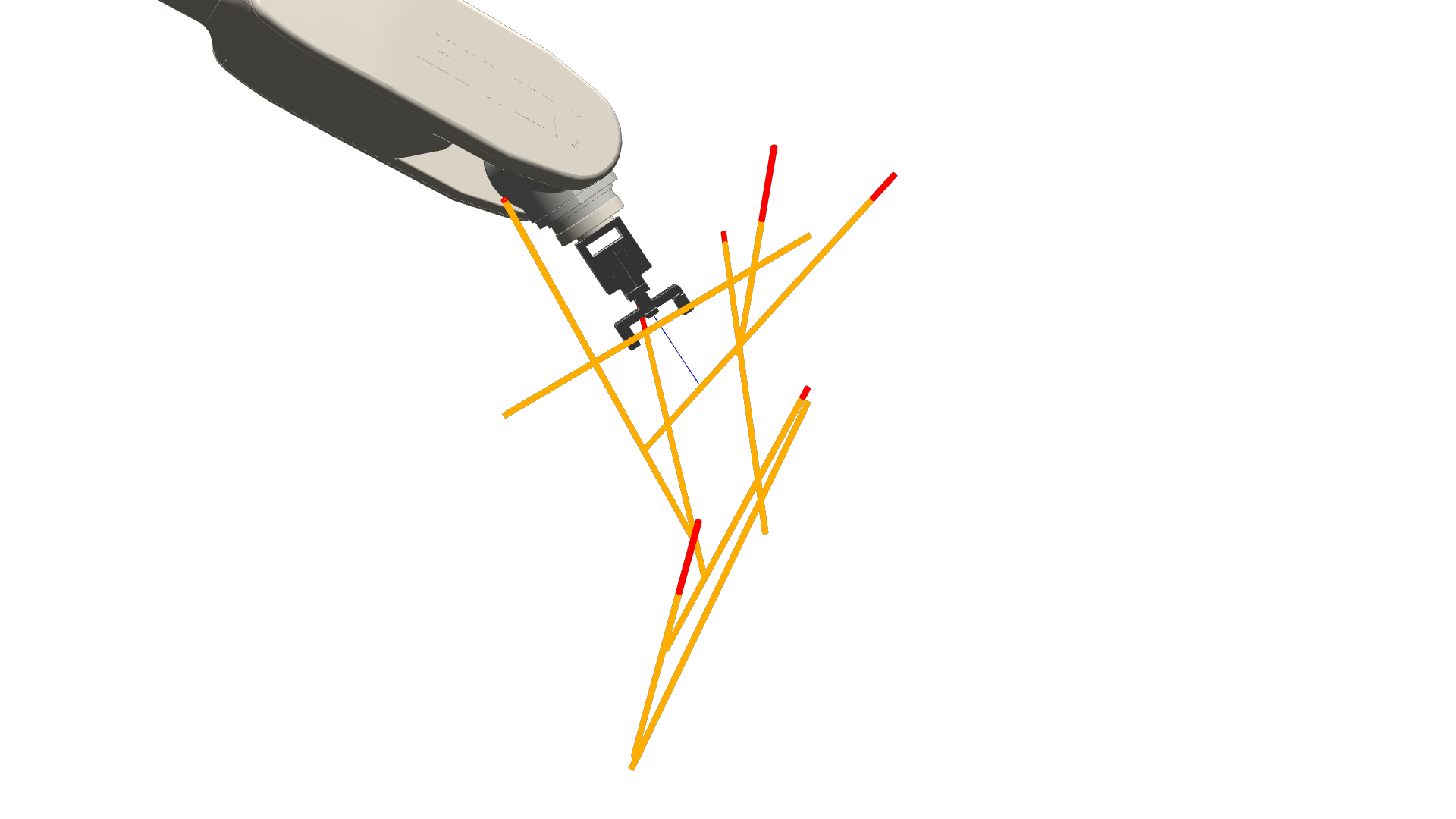
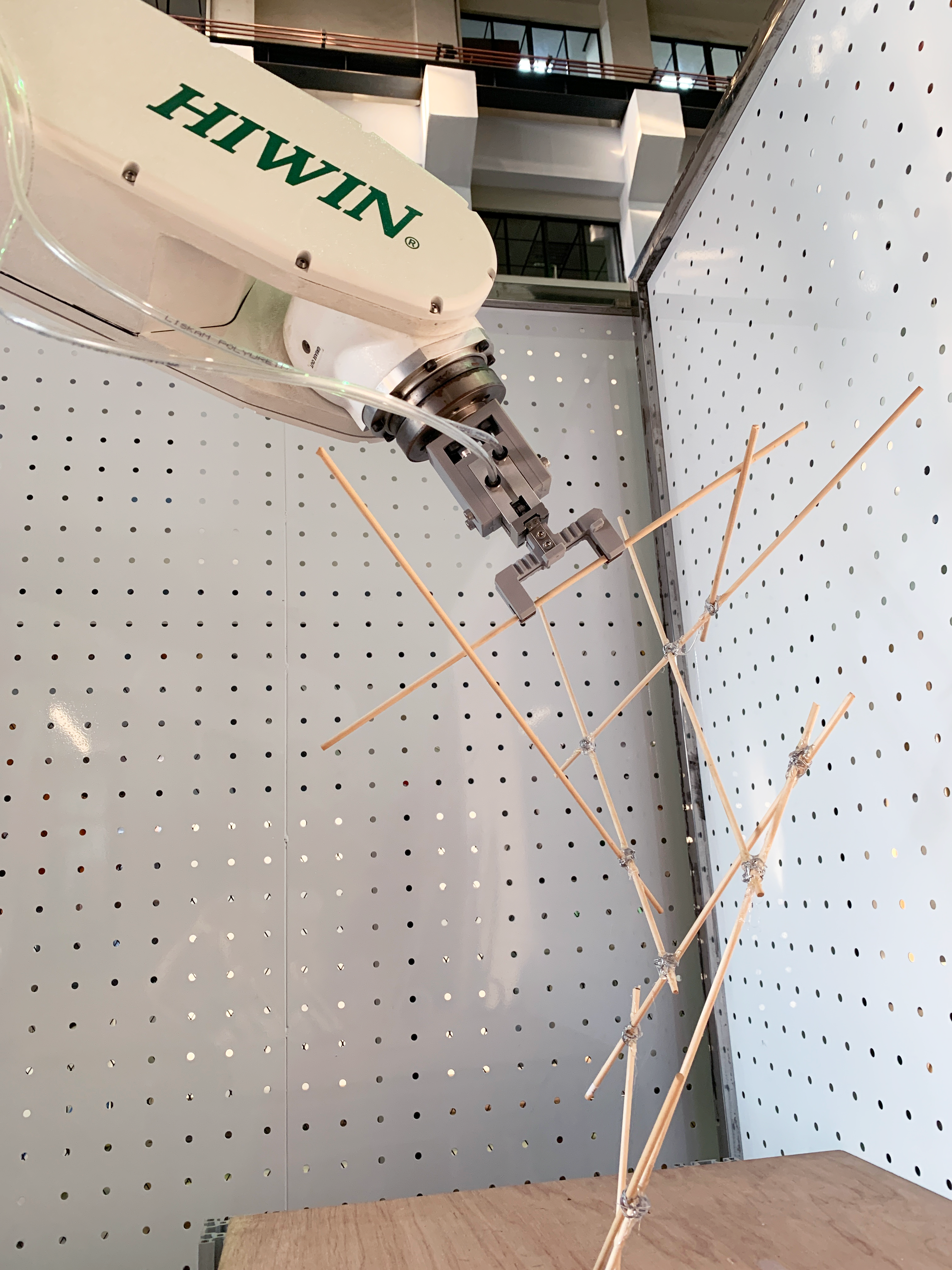
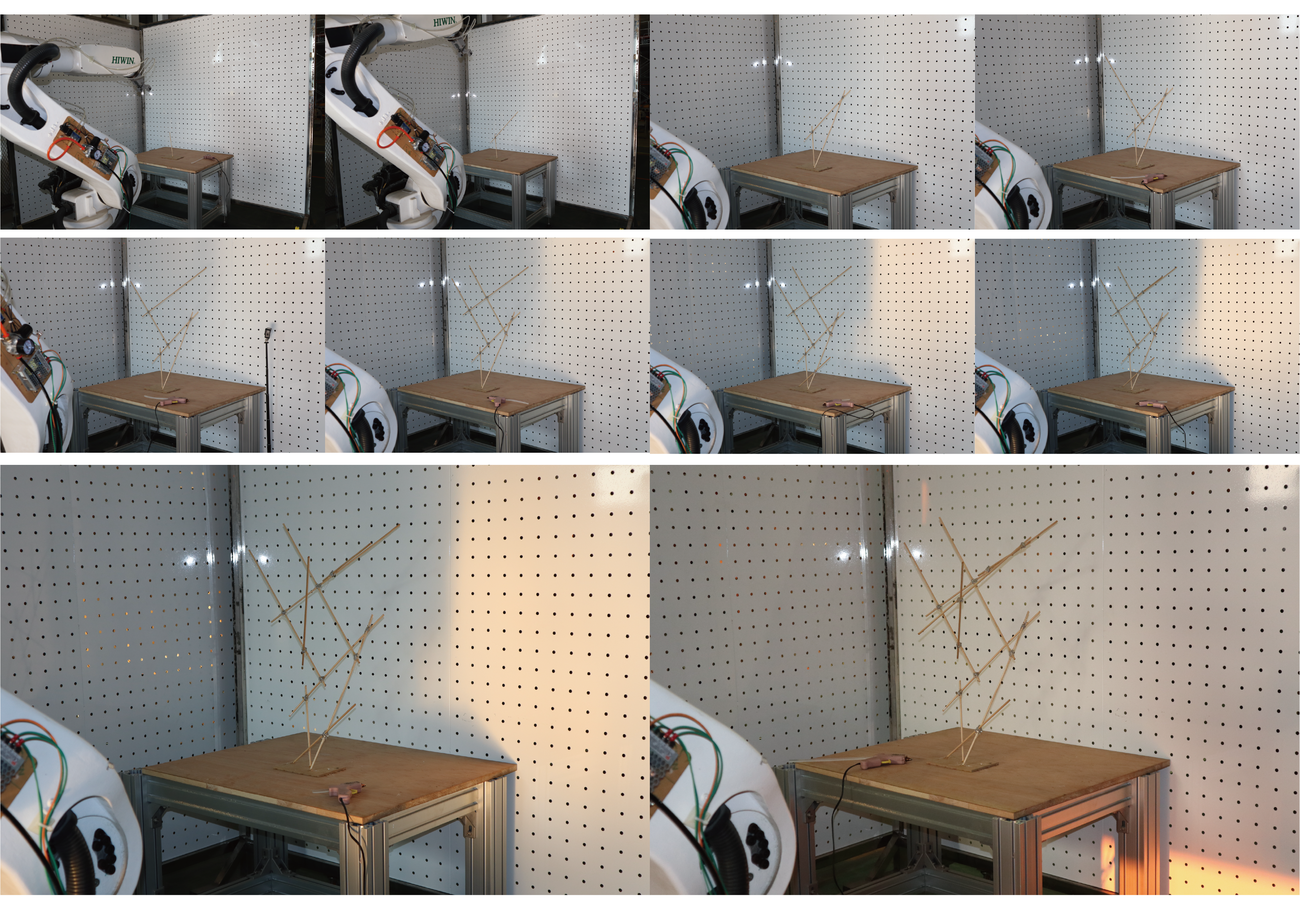
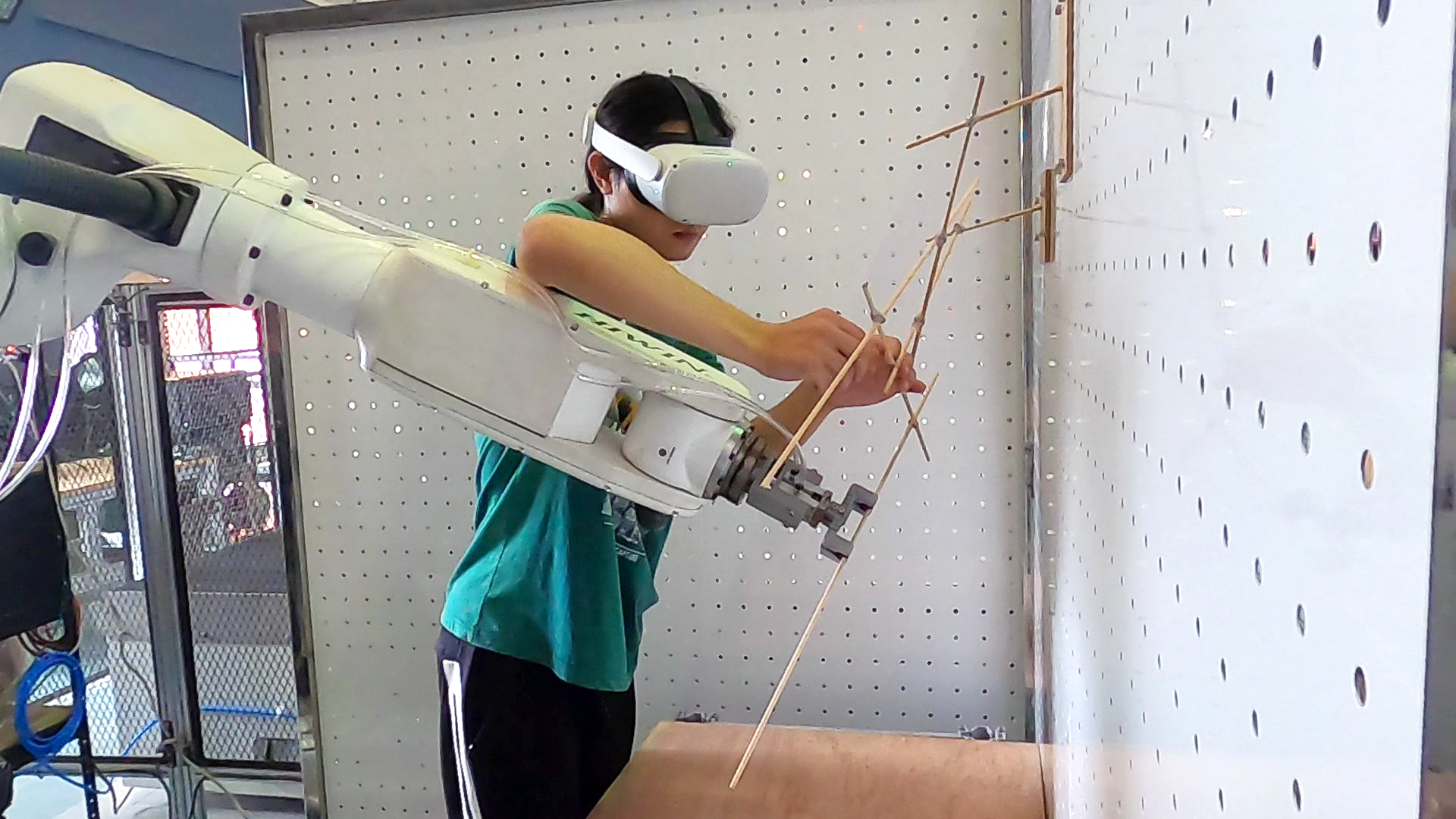
本研究中欲透過沉浸式科技與機械手臂製造之方式,試以探討人為判斷下所執行的非線性設計製造系統,並試圖導入環境資訊,使該系統的操作足以應對變化無常的現實環境。此研究以「虛實放樣」、「沉浸式設計操作」,以及「協作工藝」三個範疇來詮釋該系統,並透過 Oculus Quest 2 及上銀機器人,在程式語言與參數化軟體等環境的整合下完成了混合實境下機器人協作工藝的系統建置。在操作上以定位木棒材料作為該系統的製程方式,操作者可於混合實境中設計三維空間中之線段,再透過機械手臂抓取材料並精準定位於該設計線段上。