Arthur: Jia-Shuo Hsu
Date: Oct 2022
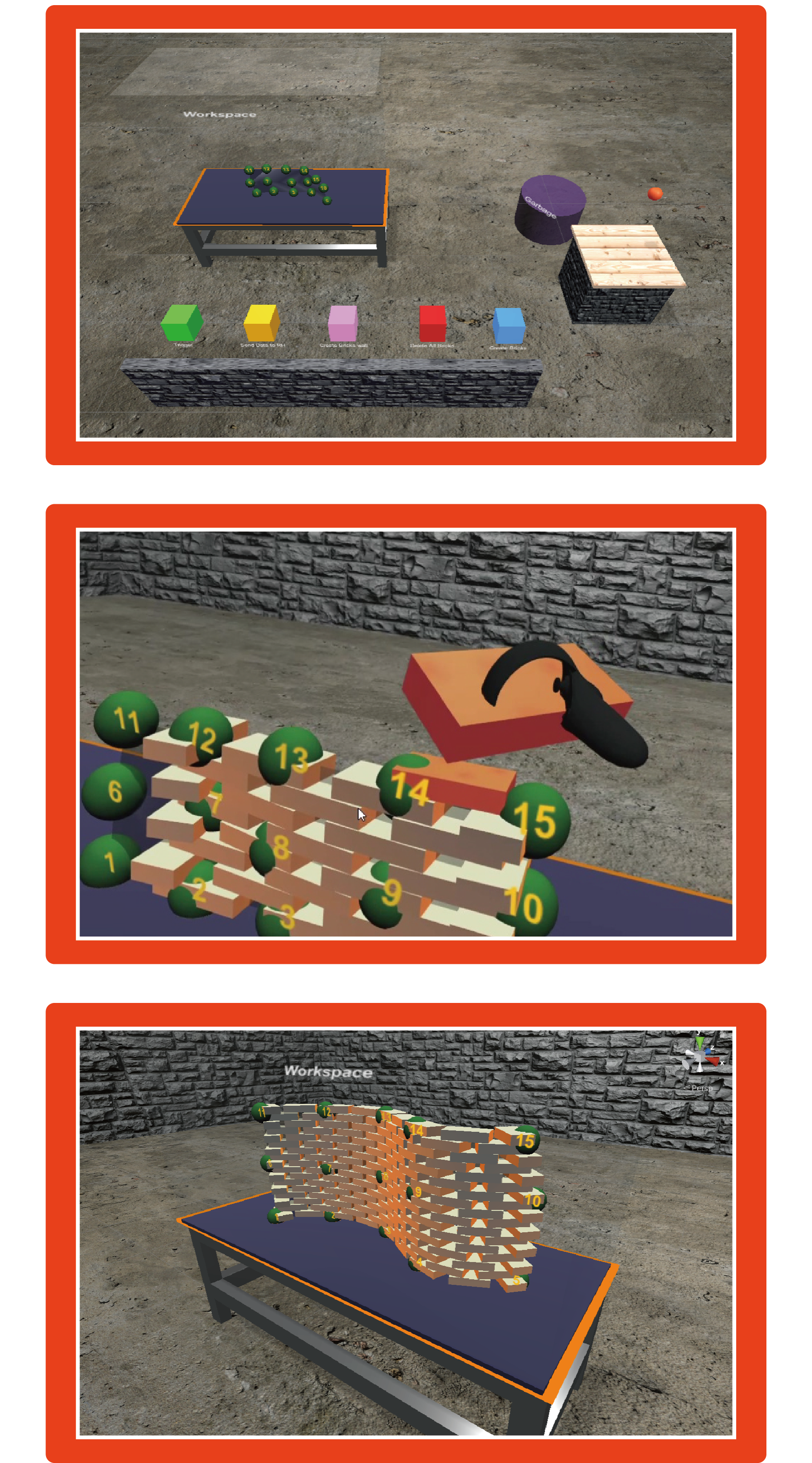
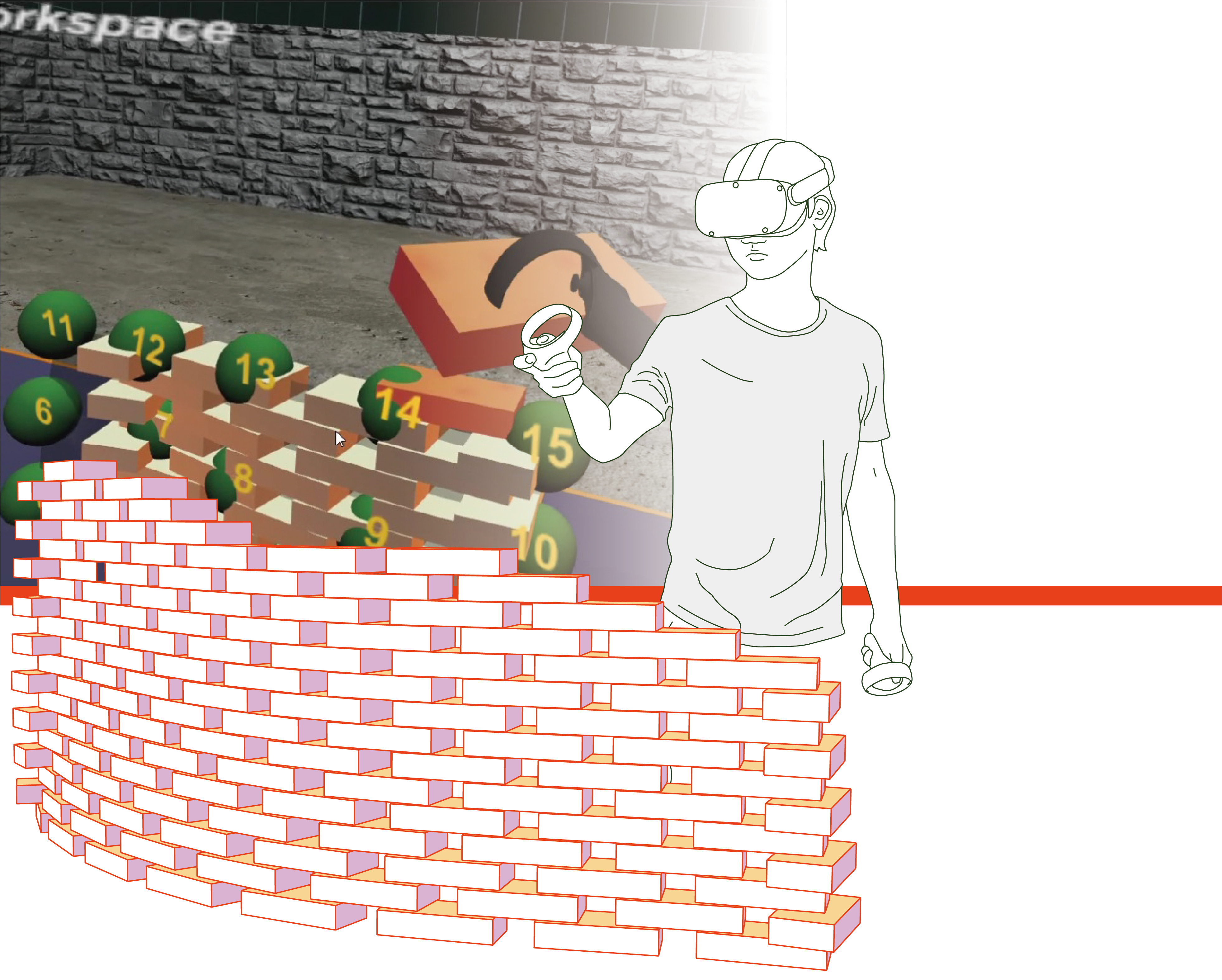
This paper proposes the TRAC (Teaching-based Robotic Arm Construction) system, which aims at intuitive robotic brickwork. The goal is to integrate the design-to-build process and help designers to implement robotic fabrication.
The paper introduces two-staged steps of practice:
- 1. The teaching-based design method simulates brick-laying motion in VR to lead the intuitive design process.
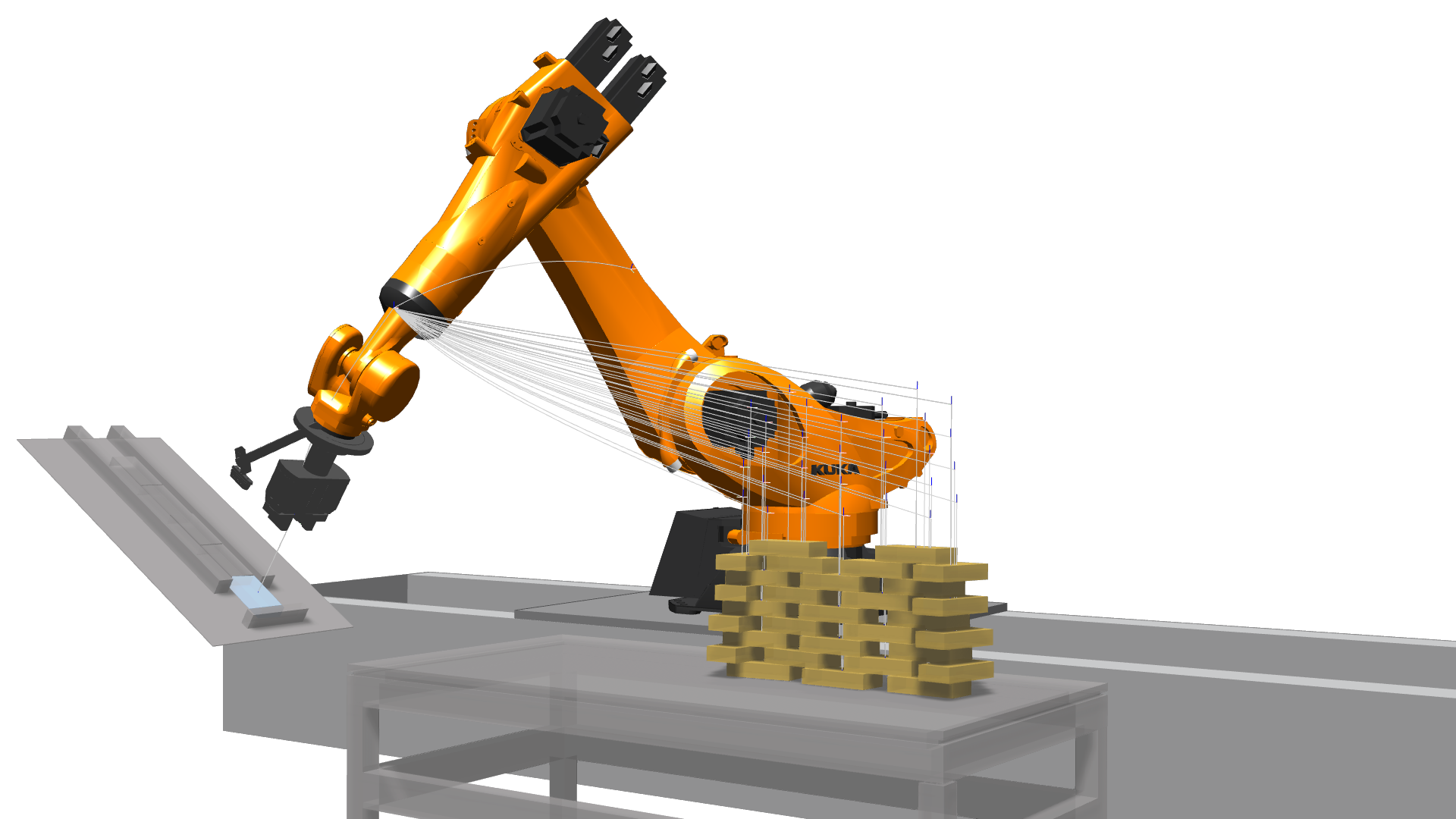
- 2. The auto-translation from the design result in the robotic arm bricklaying tool path.
Finally, the workflow is implemented with the KUKA robot cell at Raccoon. The brick wall validates the seamless process from intuitive teaching-based design to robotic fabrication.